The AERPAW platform announced the winners of its second AERPAW Autonomous Data Mule (AADM) Challenge, a multi-phased autonomous unmanned aerial vehicle (UAV) student competition. The challenge tasked student teams to download data from four AERPAW base stations (BSs) as quickly as possible with a UAV.
Explore the winning strategies below.
1st Place: InFlux – University of Utah
Team Lead: Anirudh Kamath
Team Members: Axe Tang
Advisor: Dr. Jacobus (Kobus) Van der Merwe
Approach:
- Influx’s solution employs an iterative method that determines the ideal destination to fly towards in a periodic manner. It takes into account the provided challenge data volume distribution skew and selects a pre-determined location (waypoint) that is strategically close to a selected base station.
- This selection is done by assessing a utility score, which is a function of the remaining data volumes at the current time. This utility score measures the advantage in selecting a new base station to fly towards versus staying near the closest base station at the “go-forward” stage of the UAV state machine, allowing our solution to dynamically make informed decisions.
- Moreover, the solution was designed to account for (1) the target speed of the drone, (2) the geofence restrictions, (3) the average Signal-to-Noise ratio (SNR) observed at each waypoint when developing the solution on the AERPAW digital twin, (4) the best yaw angles for each waypoint, and (5) empirical data provided by the AERPAW team from the field to determine the optimal time to move to a new waypoint.
2nd place: Neural Flyers – North Carolina State University
Team Lead: Ahmed Manavi Alam
Team Members: Cemre Omer Ayna, Sultan Mohammad Manjur
Advisor: Dr. Ali Gurbuz
Approach:
- Waypoint Strategy: Waypoints were empirically chosen inside the geofence and near base stations, while intermediate waypoints were inserted to ensure safe routing; at these intermediate waypoints, the UAV does not pause for downloads.
- Download Logic: At hover points near each base station, the UAV performs a full 0–360° heading sweep to maximize link quality, then waits until at least 85% of the data is downloaded. This threshold saves time since the remaining portion can continue transferring while moving toward the next waypoint.
- Time & Safety Controls: Each hover waypoint has a maximum allotted wait time, and all trajectory commands are validated by a safety checker. Throughout the mission, base stations are dynamically reprioritized based on SNR and remaining data volume, with the UAV completing the mission after completing the data download.

3rd Place: IMPRESS@UGA Team – University of Georgia
Team Lead: Kaies Al Mahmud
Team Members: Tanvir Anjum, Sriman Bidhan Baray, Joyita Halder
Advisor: Dr. Mehmet Kurum
Approach:
- IMPRESS@UGA Team analyzed AERPAW literature and field‐experiment datasets to determine pre-optimized UAV waypoints (latitude, longitude, altitude) and orientations (roll, pitch, yaw) to maximize SNR for each base station.
- The UAV traveled along the waypoints, dynamically adjusting both the wait time and the target base station at each point according to the required data distribution for data download.
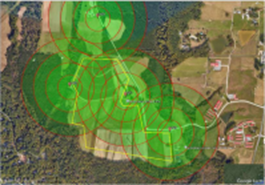
Figure 1: Determining optimal height for each base station from field experiments.
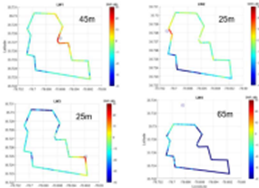
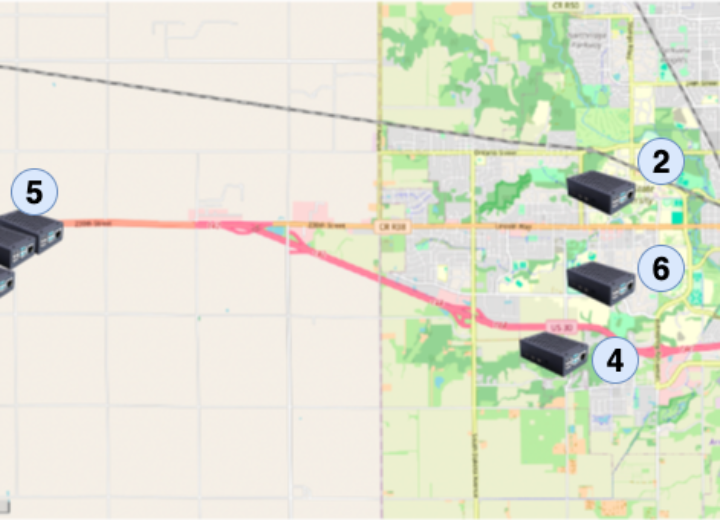
Figure 2: Visualizing distance radius for each base station for UAV path optimization.
WiMNet Team – Columbia University
Team Lead: Kevin Liu Hermstein
Team Members: Weijie Wang
Advisor: Dr. Gil Zussman
Approach:
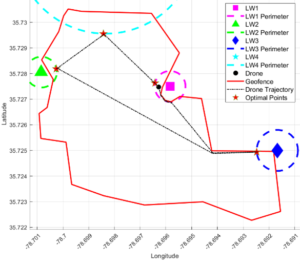
- WiMNet first generated a set of points associated with each base station by drawing a circle centered at each base station and picking 10 points that lie on this circle and are within the boundary zone.
- WiMNet then solved the “Traveling Salesman Problem with Neighborhoods” to pick the optimal points from each set and the path between the selected points. As the UAV arrives at each point, it rotates to find the drone orientation that maximizes the SNR.