The AERPAW Find a Rover (AFAR) Challenge Lifts Off!
AERPAW has launched the AERPAW Find a Rover (AFAR) challenge, its first contest in a series of new student drone competitions. For AFAR, students were asked to use an unmanned aerial vehicle (UAV) outfitted with a software-defined (SDR) radio to localize the signal from an unmanned ground vehicle (UGV).
Competitors were given the antenna patterns for both the transmitter and receiver antennas, as well as a geographical map of the test environment. Participants then had the option to use fixed waypoints for a UAV test run to find the UGV, or to develop their own trajectory update algorithm for instructing which order of waypoints the UAV should fly based on the observed signal strength form the UGV signal source.
As a standard for all AERPAW drone competitions, experimenters must first develop and test their UAV and radio frequency (RF) software in AERPAW’s virtual development (digital twin) environment. Selected software from the competitors that satisfy minimum success criteria in the digital twin environment is then deployed in the real testbed environment at Lake Wheeler Field Laboratory – without any modifications – for the second (and final) round of competition.
Meet the Competitors for AFAR!
Five student teams submitted entries in the AFAR competition, all of which are now being evaluated for test deployment at Lake Wheeler.
Teams:
- NYU Tandon School of Engineering
- University of Georgia – Team SunLab
- North Carolina State University – Daedalic Wings
- North Carolina State University – Team Wolfpack
- University of North Texas – Eagles Team
Read about the team members and their approaches below. Top finalists will receive prize funds thanks to AERPAW’s sponsors: Galaxy Unmanned Systems, LLC, Unmanned Experts Inc., and AnyMile.

NYU Tandon School of Engineering
Weijie Wang, B.S. Computer Engineering
Advisor Fraida Fund, Research Assistant Professor
Approach:
- First, we quickly approximate the rover position by traversing the edges of the bounding rectangle, and record the longitude and latitude at which the strongest signal is observed.
- Then, the drone flies to waypoints suggested by a Bayesian Optimization, and measures signal strength at each waypoint in order to improve its estimate of the rover position.

University of Georgia – Team SunLab
Dr. Haijian Sun
Paul Kudyba
Lihao Zhang
Hanwen Zhang
Approach:
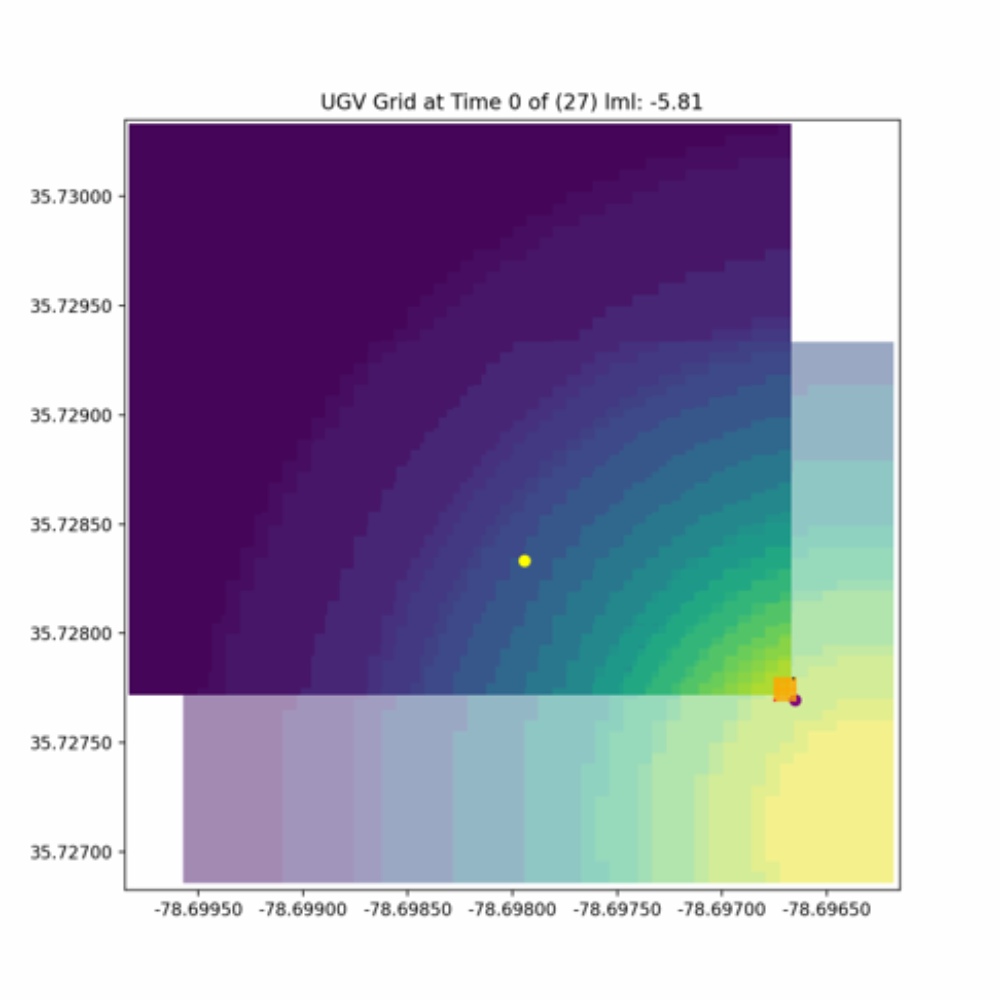
- A prediction grid of the entire search area is used to find the mean and variance via a Gaussian Process Regression.
- After a short-preplanned routine, the UAV searches a dynamic path based on the upper confidence bound via Bayesian optimization of the current field estimate.
- After the UAV converges to an estimated peak, a circle of waypoints is created to finalize the maximum estimate corresponding to the ground rover’s location.
North Carolina State University – Daedalic Wings
Dr. Yuchen Liu, Faculty Advisor and Assistant Professor
Baisakhi Chatterjee, Team Lead
Sonali Chaudhari
Zhizhen Li
Approach: For our algorithm, we used the Least Square Method to estimate the position of the rover based on the loss of signal strength due to separation distance between the source and receiver. We used a previously collected datapoint consisting of signal strength and distance of the UAV from the drone as a reference point (using a known location of the rover) and used it to calculate the rover position using the Path Loss formula, as provided in the reference paper1. Signal strength is sampled at pre-determined waypoints. If the UAV finishes searching all the waypoints, it will move forward till it hits the geofence, at which point it will turn right.

North Carolina State University – Team Wolfpack
Dr. Chai-Wai Wong, Team Advisor
Gauthan Raddy, PhD student
Sergio Vargas, MS Student
Saad Masrur, PhD student
Cole Dickerson, PhD student
Approach:
- The drone was set to travel in the fixed spiral trajectory shown on the left. Localization estimates were given at 3 and 10 minutes.
- Our submission ran a particle filter algorithm and treated the Rover estimation as a tracking problem. We took advantage of the fixed search area and optimized UAV trajectory to maximize RSSI observations across the field, hence increasing rover localization accuracy.

University of North Texas – Eagles Team
Jaya Sravani Mandapaka
Logan McCorkendale
Zachary McCorkendale
Mathias Kidane
Kamesh Namuduri, Advisor
Approach:
- Initially after taking off the drone goes to the nearest coordinate. Then it performs the perimeter sweep.
- It finds the highest possible power location and performs a quadrant search recursively.
- Our speed reduces from 10 m/s to 1 m/s as the drone quadrant is approaching the rover.

Thank You to AERPAW’s Sponsors!
Galaxy Unmanned Systems
Galaxy Unmanned Systems L.L.C. is made of a core group of industry professionals that have worked their way up first through the commercial side of the UAS industry and then the DoD side. Experience and skills of Galaxy Unmanned Systems include concept, design, manufacturing, certification, testing, payload configuration, subsystem integration, documentation, training and operations. These assertions are backed by a cumulative 40 + years of hands on industry experience with VTOL, fixed wing, rotary wing and RPAs, RPVs, UAV’s, sUAS/UAS and LTA systems.
Unmanned Experts
Unmanned Experts Inc. (UMEX) is a world-leading provider of Subject Matter Expertise in the nascent fields of autonomous robotics, swarms, UTM and mass data. UMEX also has class-beating experience in the traditional unmanned aircraft systems (UAS) domains and provides the rare capability to originate and conduct research development, testing and evaluation (RDT&E) of unmanned technologies, develop working Concepts of Operation (CONOPs) and then field them operationally.
AnyMile Platform
The AnyMile platform provides the first end-to-end solution for commercial and industrial drone-based delivery & logistics at scale. The Fleet Management app allows fleet owners and operators to manage and scale their drone fleet operations, missions, and maintenance needs. The Shipment Management app allows companies to access drone-based services to manage cargo delivery, banner towing, and infrastructure inspections. The Service Management app allows infrastructure service providers to set up, manage, and sell infrastructure-based services to drone fleet operators. The platform behaves like an Enterprise Resource Planning (ERP) system for drone-based logistics leading to improved efficiency, better decision-making, and increased profitability.